 |
Прочитано: 0% |
Оглавление | Каталог библиотеки | Далее»»»
|
Прочитано: 0% |
Экспериментальная проверка помехозащищенности навигационной системы, использующая фазоманипулированные (ФМ) сигналы показала, что GPS подвержена элементарной организованной помехе. В качестве помехи используется моночастотный сигнал по частоте близкий к несущей ФМ-сигнала. В результате между несущей сигнала и помехой возникают биения, что приводит к искажениям суммарного сигнала, делающего невозможным его прием коррелятором.
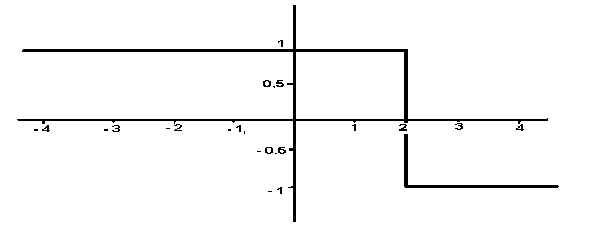
В американской спутниковой навигационной системе GPS NAVSTAR используются фазоманипулированные (ФМ) сигналы [1], считавшиеся наиболее помехозащищенными [2]. Во времени ФМ сигнал представляет собой синусоиду, фаза которой в заданные моменты времени меняется на противоположную. В приемнике GPS осуществляется прием посылки, когда 1 бит передается с помощью 1024 элементарных ФМ-посылок, т.е. применяется коррелятор, сворачивающий имеющуюся в приемнике копию с принимаемым сигналом, т.е. осуществляется прием 1024 элементов в целом [3].
В статье [4] рассматривается несколько другой вариант - помехоустойчивость поэлементного приема фазоманипулированных сигналов на фоне наиболее неблагоприятных помех. Другими словами, вариационными методами синтезирована оптимальная помеха поэлементному приему фазоманипулированного сигнала. В этой же статье показано, что активная помеха в виде расстроенной несущей при определенных условиях практически (разница менее 1%) эквивалентна оптимальной помехе. Этот факт можно объяснить возникновением биений между несущей ФМ-сигнала и несущей активной помехи.
Поскольку проще немодулированной несущей активную помеху представить себе трудно, то представляется важным исследовать эффективность приема ФМ-сигнала в целом при наличии активной помехи в виде расстроенной несущей, аналогично предложению статьи [3].
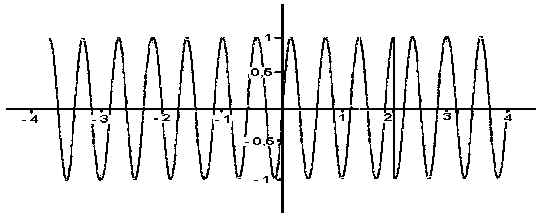
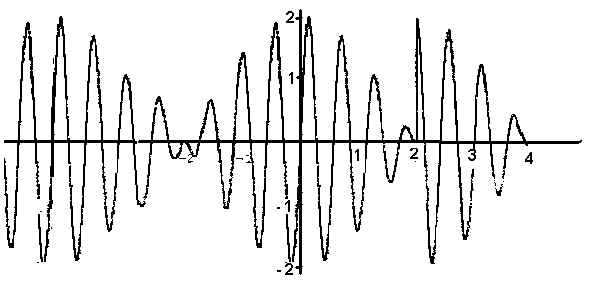
Полоса пропускания входных цепей коррелятора не может быть уже величины примерно 1/w, где t - длительность элементарной посылки ФМ-сигнала. А для увеличения точности измерения времени прихода полоса пропускания должна быть больше. Если в пределах полосы пропускания входных цепей коррелятора GPS окажется помеха в виде немодулированной несущей, между ФМ-сигналом и помехой возникнут биения (1), представляющие собой несущую частоту, расположенную между частотой ФМ-сигнала и частотой помехи. Эта несущая оказывается промодулированной по амплитуде частотой, равной разности частот ФМ-сигнала и помехи, а фаза в соседних максимумах биений сдвинута на 180 градусов. При расстройке частоты на величину порядка 1/w фаза меняется примерно так, как у исходного ФМ-сигнала. В результате сложения ФМ-сигнала и помехи получится сигнал, далекий от исходного ФМ-сигнала, поэтому на выходе коррелятора сигнальная компонента будет значительно подавлена. В результате работа GPS в радиусе действия станции помех (примерно прямая видимость) нарушится. Для проверки данного теоретического предположения был проведен эксперимент.
Для проведения эксперимента был взят серийный приемник фирмы "ASHTECH" типа OEM "Sensor" (12 канальный, одночастотный F0 =1575,42 МГц с открытым C/A кодом), программное обеспечение ver.1E11DRP. Антенна GPS (самолетная) P/N AT 575-12, фирмы "Aero Antenna Technology Inc." с типовым кабелем длиной 10 м. Антенна располагалась на высоте 15 м над землей. В качестве передатчика активной помехи использовался высокочастотный генератор стандартных сигналов типа Г4-78, максимальная выходная мощность на выходе 0,0001 Вт; выходной аттенюатор от 0 дБ до -130 дБ; генерация непрерывная, суммарная максимальная погрешность установки частоты генератора по шкале 0,2%. Антенной передатчика служил полуволновой вибратор, расположенный на высоте 1 м. Расстояние между антенной передатчика помех и приемника GPS изменялось от 0 до 200 м. Для индикации использовалась IBM PC с программой приема, отображения, регистрации и управления для приемника GPS - "ashmono.exe".
Оглавление | Каталог библиотеки | Далее»»»
|
| ||||||||
|
|
|
|
|
|
|
|||